반응형
smbd 실행 시 Out of Memory 또는 실행이 되더라도 정상적으로 동작하지 않을때, 디버깅 및 실행에 관련된 사항을
확인하기 위하여, smbd 를 foreground 및 stdout 옵션을 주어 실행되는 내용을 확인한다.
$ smbd -F -S --debuglevel 3
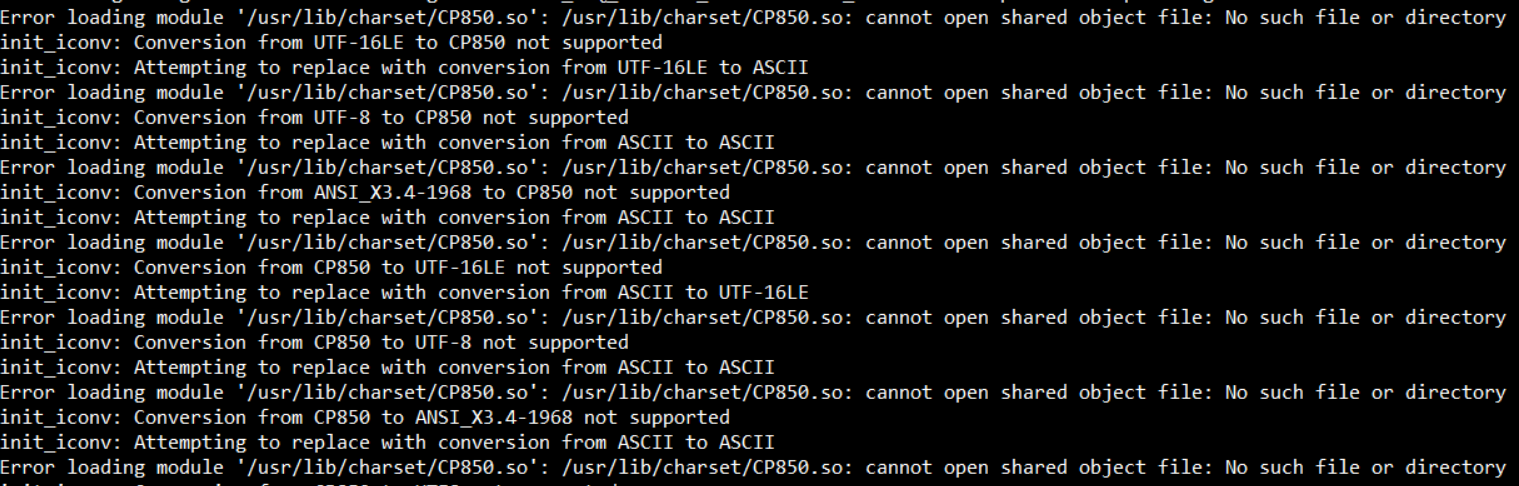
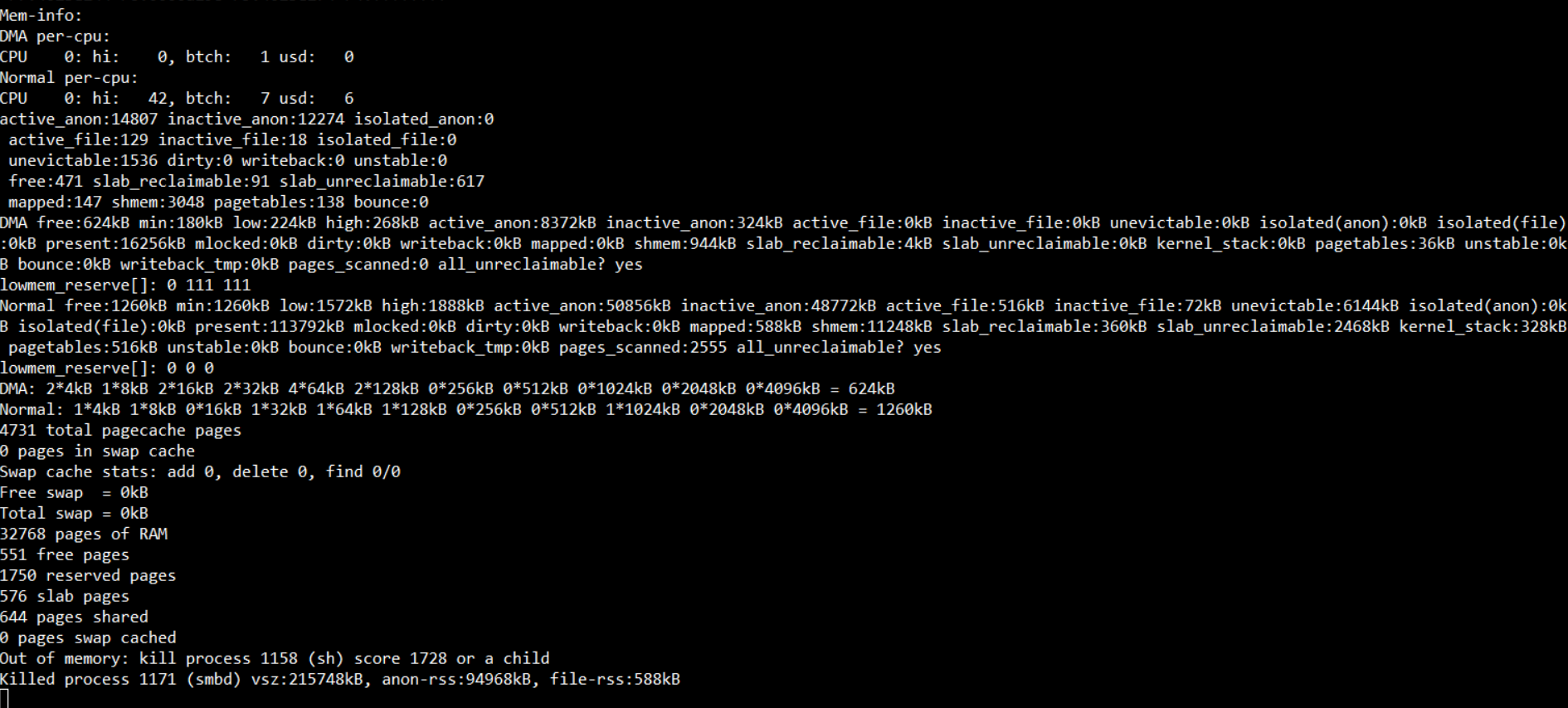
위와 같은 메세지가 출력되는 것을 확인 할 수 있으며, 아래와 같이 top 으로 확인 시 메모리가 계속해서 누수가 발생하여, 결국 Out of Memory 로 인해 커널에서 프로세스가 죽게된다.

이런 경우, 위의 Debug 메세지와 같이 iconv 에서 변환하려는 과정에서 Memory Leak 이 연속적으로 발생하게 되고,
메모리 한계치에 도달하게 되면 위와 같이 프로세스가 강제로 죽게된다.
이 문제점을 해결하기 위해 /etc/samba/smb.conf 에서 아래의 옵션을 추가하여 iconv 함수 내에서 memory leak을 우회하여, samba가 정상적으로 동작 할 수 있도록 설정하여 막을 수 있다.
dos charset = UTF-8
display charset = UTF-8
위의 옵션을 추가하여 재실행을 하거나, cp850.so 파일을 생성하여 해결이 가능하지만, utf-8 로 손쉽게 처리가 가능하다.
반응형
'System Programming > Tips' 카테고리의 다른 글
| LInux History command 자동 저장 및 환경 설정 파일 (0) | 2020.03.16 |
|---|---|
| Rockchip Booting Mode Description (0) | 2020.03.11 |
| [TSLIB] selected device is not a touchscreen I understand 문제 (0) | 2017.05.10 |
| 크로스 컴파일 실행파일 no such file or directory 문제 (0) | 2017.01.17 |
| HDMI Hot Plug Detect Pin and +5V Pin (0) | 2016.12.26 |
